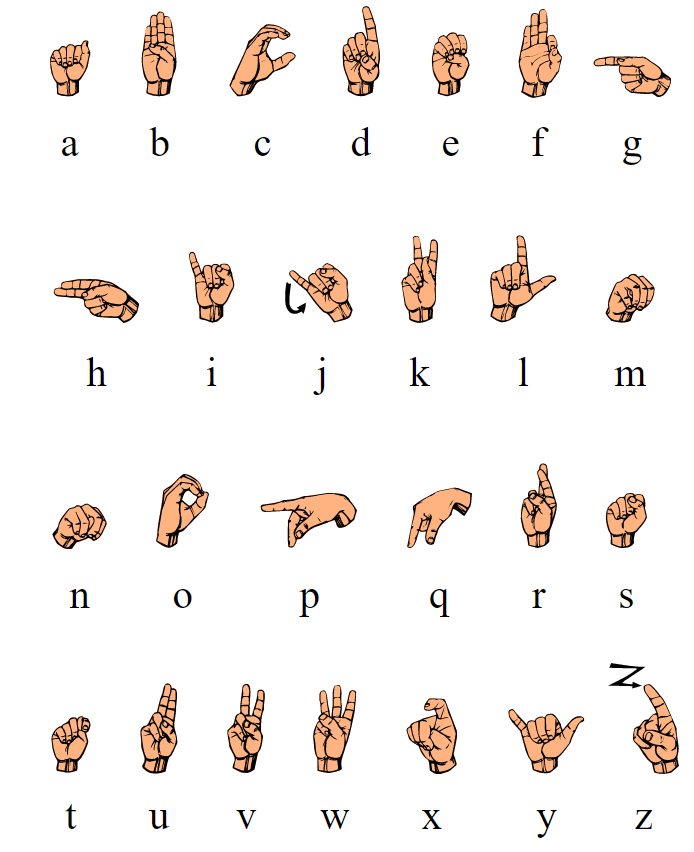
华为机器学习(ML Kit)提供手部关键点识别服务,可用于手语识别。手部关键点识别服务能识别手部21个关键点,通过每个手指的方向和手语规则作比较去找手语字母表。
应用场景
手语通常被听力和口语有障碍的人来使用,是收集手势包含日常互动中所使用的动作和手势。使用ML Kit 可以建立一个智能手语字母表识别器,它可以像一个辅助器一样将手势翻译成单词或者句子,也可以将单词或者句子翻译成手势。这里尝试的是手势当中的美国手语字母表,是基于关节,手指和手腕的位置进行分类。接下来小编将会尝试从手势中收集单词“HELLO”。
开发步骤
1. 开发准备
详细的准备步骤可以参考华为开发者联盟,这里列举关键的开发步骤。
1.1 启动ML Kit
在华为开发者AppGallery Connect, 选择Develop > Manage APIs。确保ML Kit 激活。
1.2 项目级gradle里配置Maven仓地址
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 | buildscript {
repositories {
...
maven {url 'https://developer.huawei.com/repo/'}
}
}
dependencies {
...
classpath 'com.huawei.agconnect:agcp:1.3.1.301'
}
allprojects {
repositories {
...
maven {url 'https://developer.huawei.com/repo/'}
}
}
|
1.3 集成SDK后,在文件头添加配置
1 2 3 4 5 6 7 8 9 | apply plugin: 'com.android.application'
apply plugin: 'com.huawei.agconnect'
dependencies{
// Import the base SDK.
implementation 'com.huawei.hms:ml-computer-vision-handkeypoint:2.0.2.300'
// Import the hand keypoint detection model package.
implementation 'com.huawei.hms:ml-computer-vision-handkeypoint-model:2.0.2.300'
}
|
1.4 将以下语句添加到AndroidManifest.xml文件中
1 2 3 | <meta-data
android:name="com.huawei.hms.ml.DEPENDENCY"
android:value= "handkeypoint"/>
|
1.5 申请摄像头权限和本地文件读取权限
1 2 3 4 | <!--Camera permission-->
<uses-permission android:name="android.permission.CAMERA" />
<!--Read permission-->
<uses-permission android:name="android.permission.READ_EXTERNAL_STORAGE" />
|
2. 代码开发
2.1 创建用于相机预览的Surface View,创建用于结果的Surface View。
目前我们只在UI中显示结果,您也可以使用TTS识别扩展和读取结果。
1 2 3 4 5 6 7 8 9 10 11 12 13 | mSurfaceHolderCamera.addCallback(surfaceHolderCallback)
private val surfaceHolderCallback = object : SurfaceHolder.Callback {
override fun surfaceCreated(holder: SurfaceHolder) {
createAnalyzer()
}
override fun surfaceChanged(holder: SurfaceHolder, format: Int, width: Int, height: Int) {
prepareLensEngine(width, height)
mLensEngine.run(holder)
}
override fun surfaceDestroyed(holder: SurfaceHolder) {
mLensEngine.release()
}
}
|
2.2 创建手部关键点分析器
1 2 3 4 5 6 7 8 9 | //Creates MLKeyPointAnalyzer with MLHandKeypointAnalyzerSetting.
val settings = MLHandKeypointAnalyzerSetting.Factory()
.setSceneType(MLHandKeypointAnalyzerSetting.TYPE_ALL)
.setMaxHandResults(2)
.create()
// Set the maximum number of hand regions that can be detected within an image. A maximum of 10 hand regions can be detected by default
mAnalyzer = MLHandKeypointAnalyzerFactory.getInstance().getHandKeypointAnalyzer(settings)
mAnalyzer.setTransactor(mHandKeyPointTransactor)
|
2.3 开发者创建识别结果处理类“HandKeypointTransactor”
该类MLAnalyzer.MLTransactor<T>接口,使用此类中的“transactResult”方法获取检测结果并实现具体业务。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 | class HandKeyPointTransactor(surfaceHolder: SurfaceHolder? = null): MLAnalyzer.MLTransactor<MLHandKeypoints> {
override fun transactResult(result: MLAnalyzer.Result<MLHandKeypoints>?) {
var foundCharacter = findTheCharacterResult(result)
if (foundCharacter.isNotEmpty() && !foundCharacter.equals(lastCharacter)) {
lastCharacter = foundCharacter
displayText.append(lastCharacter)
}
canvas.drawText(displayText.toString(), paddingleft, paddingRight, Paint().also {
it.style = Paint.Style.FILL
it.color = Color.YELLOW
})
}
|
2.4 创建LensEngine
1 2 3 4 5 6 | LensEngine lensEngine = new LensEngine.Creator(getApplicationContext(), analyzer)
setLensType(LensEngine.BACK_LENS)
applyDisplayDimension(width, height) // adjust width and height depending on the orientation
applyFps(5f)
enableAutomaticFocus(true)
create();
|
2.5 运行LensEngine
1 2 3 4 5 6 7 8 9 | private val surfaceHolderCallback = object : SurfaceHolder.Callback {
// run the LensEngine in surfaceChanged()
override fun surfaceChanged(holder: SurfaceHolder, format: Int, width: Int, height: Int) {
createLensEngine(width, height)
mLensEngine.run(holder)
}
}
|
2.6 停止分析器,释放检测资源
1 2 3 | fun stopAnalyzer() {
mAnalyzer.stop()
}
|
2.7 处理 transactResult() 以检测字符
您可以使用HandKeypointTransactor类中的transtresult方法来获取检测结果并实现特定的服务。检测结果除了手部各关键点的坐标信息外,还包括手掌和每个关键点的置信值。手掌和手部关键点识别错误可以根据置信值过滤掉。在实际应用中,可以根据误认容忍度灵活设置阈值。
2.7.1 找到手指的方向
让我们先假设可能手指的矢量斜率分别在X轴和Y轴上。
1 2 | private const val X_COORDINATE = 0
private const val Y_COORDINATE = 1
|
假设我们有手指分别在5个矢量上,任意手指的方向在任意时间可以被分类为上,下,下-上,上-下,不动。
1 2 3 4 5 6 7 | enum class FingerDirection {
VECTOR_UP, VECTOR_DOWN, VECTOR_UP_DOWN, VECTOR_DOWN_UP, VECTOR_UNDEFINED
}
enum class Finger {
THUMB, FIRST_FINGER, MIDDLE_FINGER, RING_FINGER, LITTLE_FINGER
}
|
首先将对应的关键点从结果中分离到不同手指的关键点数组,像这样:
1 2 3 4 5 | var firstFinger = arrayListOf<MLHandKeypoint>()
var middleFinger = arrayListOf<MLHandKeypoint>()
var ringFinger = arrayListOf<MLHandKeypoint>()
var littleFinger = arrayListOf<MLHandKeypoint>()
var thumb = arrayListOf<MLHandKeypoint>()
|
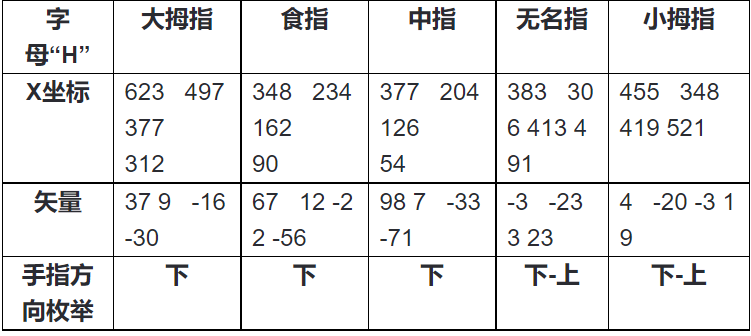
手指上的每个关键点都对应手指的关节,通过计算关节与手指的平均位置值之间的距离就可以计算出斜率。根据附近关键点的坐标,查询该关键点的坐标。
拿字母H的两个简单关键点来说:
1 2 | int[] datapointSampleH1 = {623, 497, 377, 312, 348, 234, 162, 90, 377, 204, 126, 54, 383, 306, 413, 491, 455, 348, 419, 521 };
int [] datapointSampleH2 = {595, 463, 374, 343, 368, 223, 147, 78, 381, 217, 110, 40, 412, 311, 444, 526, 450, 406, 488, 532};
|
用手指坐标的平均值来计算矢量
1 2 3 4 5 6 7 | //For ForeFinger - 623, 497, 377, 312
double avgFingerPosition = (datapoints[0].getX()+datapoints[1].getX()+datapoints[2].getX()+datapoints[3].getX())/4;
// find the average and subract it from the value of x
double diff = datapointSampleH1 [position] .getX() - avgFingerPosition ;
//vector either positive or negative representing the direction
int vector = (int)((diff *100)/avgFingerPosition ) ;
|
矢量的结果将会是正值或者负值,如果它是正值它会出现X轴的正四方向,如果相反它就是负值。用这个方式对所有字母进行矢量映射,一旦你掌握了所有的矢量我们就可以用它们来进行编程。
用上述矢量方向,我们可以分类矢量,定义第一个为手指方向枚举
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 | private fun getSlope(keyPoints: MutableList<MLHandKeypoint>, coordinate: Int): FingerDirection {
when (coordinate) {
X_COORDINATE -> {
if (keyPoints[0].pointX > keyPoints[3].pointX && keyPoints[0].pointX > keyPoints[2].pointX)
return FingerDirection.VECTOR_DOWN
if (keyPoints[0].pointX > keyPoints[1].pointX && keyPoints[3].pointX > keyPoints[2].pointX)
return FingerDirection.VECTOR_DOWN_UP
if (keyPoints[0].pointX < keyPoints[1].pointX && keyPoints[3].pointX < keyPoints[2].pointX)
return FingerDirection.VECTOR_UP_DOWN
if (keyPoints[0].pointX < keyPoints[3].pointX && keyPoints[0].pointX < keyPoints[2].pointX)
return FingerDirection.VECTOR_UP
}
Y_COORDINATE -> {
if (keyPoints[0].pointY > keyPoints[1].pointY && keyPoints[2].pointY > keyPoints[1].pointY && keyPoints[3].pointY > keyPoints[2].pointY)
return FingerDirection.VECTOR_UP_DOWN
if (keyPoints[0].pointY > keyPoints[3].pointY && keyPoints[0].pointY > keyPoints[2].pointY)
return FingerDirection.VECTOR_UP
if (keyPoints[0].pointY < keyPoints[1].pointY && keyPoints[3].pointY < keyPoints[2].pointY)
return FingerDirection.VECTOR_DOWN_UP
if (keyPoints[0].pointY < keyPoints[3].pointY && keyPoints[0].pointY < keyPoints[2].pointY)
return FingerDirection.VECTOR_DOWN
}
}
return FingerDirection.VECTOR_UNDEFINED
|
获取每个手指的方向并且储存在一个数组里。
1 2 | xDirections[Finger.FIRST_FINGER] = getSlope(firstFinger, X_COORDINATE)
yDirections[Finger.FIRST_FINGER] = getSlope(firstFinger, Y_COORDINATE )
|
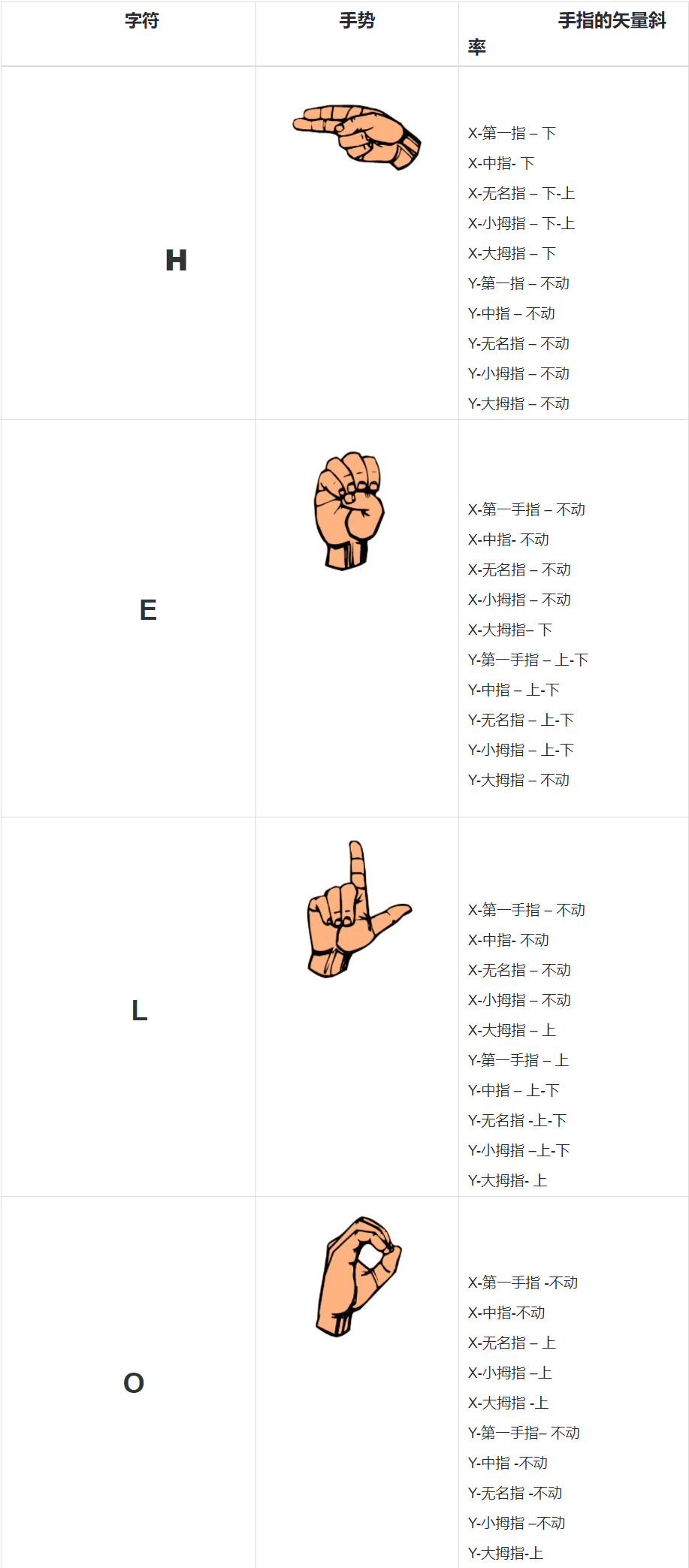
2.7.2 从手指方向找到字符:
现在我们把它当作唯一的单词“HELLO”,它需要字母H,E,L,O。它们对应的X轴和Y轴的矢量如图所示。
假设:手的方向总是竖向的。让手掌和手腕与手机平行,也就是与X轴成90度。姿势至少保持3秒用来记录字符。
开始用字符映射矢量来查找字符串
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 | // Alphabet H
if (xDirections[Finger.LITTLE_FINGER] == FingerDirection.VECTOR_DOWN_UP
&& xDirections [Finger.RING_FINGER] == FingerDirection.VECTOR_DOWN_UP
&& xDirections [Finger.MIDDLE_FINGER] == FingerDirection.VECTOR_DOWN
&& xDirections [Finger.FIRST_FINGER] == FingerDirection.VECTOR_DOWN
&& xDirections [Finger.THUMB] == FingerDirection.VECTOR_DOWN)
return "H"
//Alphabet E
if (yDirections[Finger.LITTLE_FINGER] == FingerDirection.VECTOR_UP_DOWN
&& yDirections [Finger.RING_FINGER] == FingerDirection.VECTOR_UP_DOWN
&& yDirections [Finger.MIDDLE_FINGER] == FingerDirection.VECTOR_UP_DOWN
&& yDirections [Finger.FIRST_FINGER] == FingerDirection.VECTOR_UP_DOWN
&& xDirections [Finger.THUMB] == FingerDirection.VECTOR_DOWN)
return "E"
if (yDirections[Finger.LITTLE_FINGER] == FingerDirection.VECTOR_UP_DOWN
&& yDirections [Finger.RING_FINGER] == FingerDirection.VECTOR_UP_DOWN
&& yDirections [Finger.MIDDLE_FINGER] == FingerDirection.VECTOR_UP_DOWN
&& yDirections [Finger.FIRST_FINGER] == FingerDirection.VECTOR_UP
&& yDirections [Finger.THUMB] == FingerDirection.VECTOR_UP)
return "L"
if (xDirections[Finger.LITTLE_FINGER] == FingerDirection.VECTOR_UP
&& xDirections [Finger.RING_FINGER] == FingerDirection.VECTOR_UP
&& yDirections [Finger.THUMB] == FingerDirection.VECTOR_UP)
return "O"
|
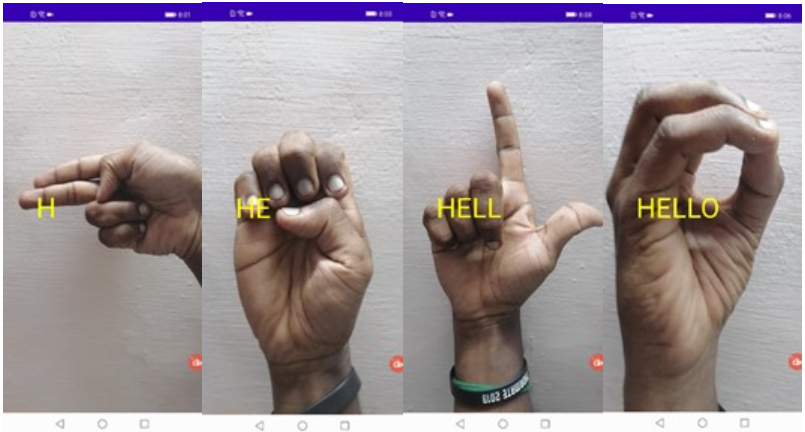
3. 画面和结果
4.更多技巧和诀窍
1. 当扩展到26个字母时,误差很更多。为了更精准的扫描需要2-3秒,从2-3秒的时间寻找和计算最有可能的字符,这可以减少字母表的误差。
2. 为了能支持所有方向,在X-Y轴上增加8个或者更多的方向。首先,需要求出手指的度数和对应的手指矢量。
总结
这个尝试是强力坐标技术,它可以在生成矢量映射后扩展到所有26个字母,方向也可以扩展所有8个方向,所以它会有26*8*5个手指=1040个矢量。为了更好的解决这一问题,我们可以利用手指的一阶导数函数来代替矢量从而简化计算。
我们可以增强其它的去代替创建矢量,可以使用图像分类和训练模型,然后使用自定义模型。这个训练是为了检查华为ML Kit使用关键点处理特性的可行性。
[培训]《安卓高级研修班(网课)》月薪三万计划,掌握调试、分析还原ollvm、vmp的方法,定制art虚拟机自动化脱壳的方法






