跨过一道45°倾斜的大门,再穿过乳白色的拱形门,仿佛进入时空穿梭的隧道,随着人头涌动的人群,一同进入Geek的世界。

Geek是《黑客帝国》中身披黑色长袍、脚穿黑皮长靴,戴着幽黑冷酷墨镜的网络黑客?

还是穿着蓝色短袖和牛仔短裤,戴着眼镜的他们?

电影终归是电影,而现实远比电影更精彩。
图片正中的三位极客,分别是来自绿盟科技格物实验室的陈杰、潘雨晨和马良,由他们所组成的战队阿凡达战队也是本次极客大赛“机器特工挑战赛”中的亚军。
马良,阿凡达战队灵魂人物,团队召集者,绿盟科技资深安全研究员,看雪学院讲师。具有十年嵌入式开发经验,精通软硬件,通信、工控、物联网领域经验丰富。
潘雨晨,90后,绿盟科技安全研究员。大学专业化工与软件工程,毕业后进入培训班学习Web漏洞挖掘,一个月后顺利进入绿盟科技。一位勇气与细致,天赋与努力并存的特别的女孩。
陈杰,95后,绿盟科技安全研究员。大学专业信息对抗技术(军事用途),校招中经过两轮面试顺利拿到绿盟offer,擅长二进制和逆向。
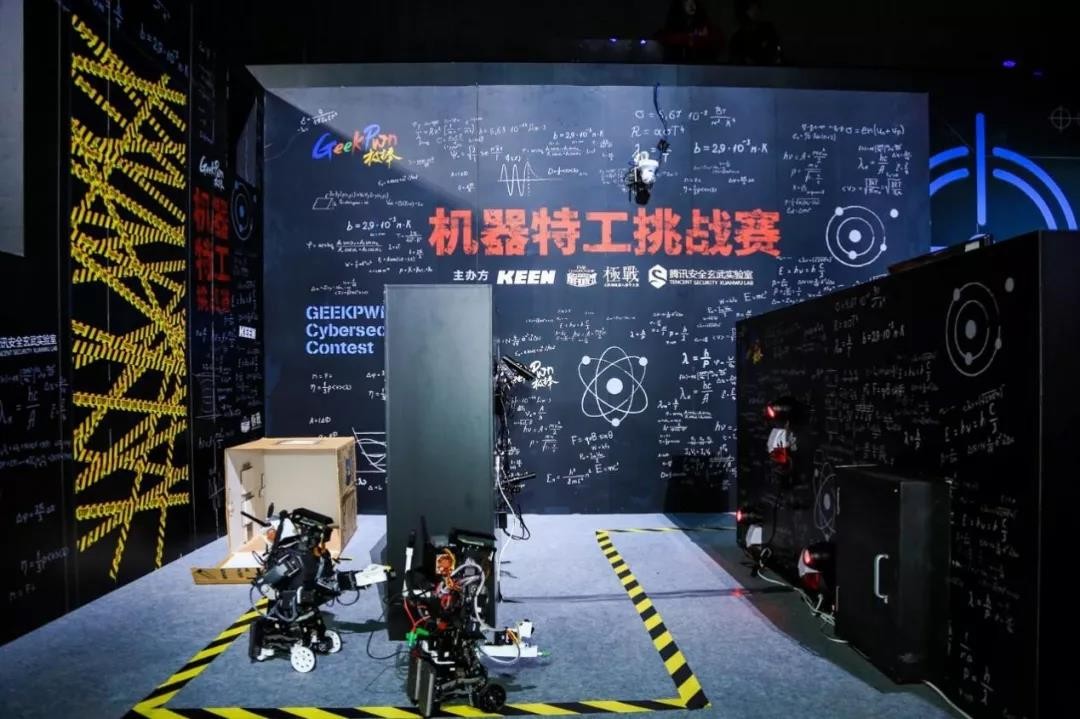
本次机器人特工挑战赛,共有来自中国、美国、印度的八支队伍参与挑战,机器特工需要在20分钟内完成ABC三区任务要求;
A区:潜入(钻出包裹/通过窗户/通过通风管);
B区:避障(躲避激光束/关闭激光束);
C区:入侵(干扰摄像头/放置窃听器/打开密码保险箱获取卡片信息/打开书本获取卡片信息/插入USB攻击设备/放置键盘记录器);
三区任务挑战成功,方可视为挑战成功。极为有限的时间对每个战队来说,都是一个巨大的挑战,不仅需要战术过硬,更考验每个战队的战略布局。
赛前经过一番讨论过后,阿凡达战队决定,首先由两个有机械臂的车——履带车和三轮车(重型车),先从箱子里冲出来因为有机械臂的车力气更大,可以更好地开路,并打开激光门、关闭激光。气球车则跟在最后,因为气球车的气球在出箱和移动的过程中需要得到保护。
上场后执行任务的原则是:每个人做自己最擅长的事情。马良负责三个机器人的硬件电路设计和软件编码;陈杰负责赛前测试和给电池充电;潘雨晨设计比赛时候的快递箱子、机械臂车的购物篮、物品摆放。除了掌握自己负责部分的操作技巧,每个队员还需要掌握操作机器人的技巧。这样,团队每个人的长处都得到了发挥。
战略布局虽已完成,但挑战才只是刚刚开始。
9月30日的深夜,马良双眼紧盯着GeekPwn的官网报名页,寂静的空气中,只听见点击着鼠标哒哒哒的响声。在这嘈杂声中,马良的思绪早已飘向2016年GeekPwn挑战赛的现场。那一场比赛,马良落寞离场,“输了,而且输的很惨。”失败的色彩染灰了那段时光,每每想起,他的心中仍然满是遗憾。
对于这次报名,他更谨慎小心,考虑的东西也更多:一旦参赛,不但所有休息时间都要搭上,连正常的睡眠也是奢望,只有努力、努力再努力。还要看设计方案是否具有真正的实用价值的创意,可能即使很努力,灵感也不一定会出现。要知道, 挑战极棒(GeekPwn)的机器特工可没有那么简单! 没有两个以上的新创意,他是不会贸然报名的。
此时,他的心中其实早已有了两个创意的雏形:一是干扰摄像头部分用放气球的方式来做,但不确定是否可以成功;二是操控方式用阿凡达电影中士兵控制机甲的方式来控制,这样的好处是远程控制起来更加直观和简单,能提高现场的操作效率。
但是,这两个有创意的方案没有经过实践验证,是否能够成功控制远程机器人? 操纵的机器人会不会抖舵?操控的稳定性和精度如何?这一切都是未知数。
当机会再次将临,是否要再次挑战自己?如果挑战再次失败怎么办?这些问题在马良的脑中循环播放。
报名的页面刷新一遍又一遍,鼠标点击了一次又一次。他回顾了电脑里2016年参加比赛的旧照片,当年备战的往事又涌上心头。指针已悄然划过23:30,此时距离报名的截止时限只剩半小时......
最后,马良还是决定参赛。他提交了极棒的报名申请。
10月8日,十一假期结束后,马良向公司领导说明了参加极棒机器特工的想法,得到公司领导的大力支持。
10月11日,阿凡达战队正式组建成功。潘雨晨、陈杰应召入队。此时,距离开赛只剩13天,而他们连比赛用的机器人还没有到货。
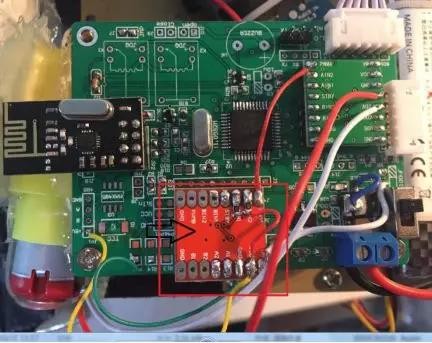
10月13日,所有零件购置完货后,正式开始组装机器人。对于从来没有组装过机器人的他们,由于缺乏经验,在组装履带车和机械臂的过程中,困难重重。组装完成后,才发现舵机没有调零,于是又拆了重新组,好不容易组装成功。却又出现了另一个更大的问题——陀螺仪小板的485通信故障!这意味着“阿凡达”的一个创意,可能无法实现。
北方十月冷清秋,这里的氛围却十分火热。他们一直保持足够的警惕,因为任何一个很小的问题,都可能随时成为最大的隐患。要制作三个功能和外形都不同的机器人,他们面临着一大堆软件和硬件问题,在经过队员们废寝忘食的查找资料、排查各种疑难bug后,才攻关解决遇到的各种奇葩问题。
一天已经过去,机器人却还没有装好。他们不得不加快脚步。陈杰和潘多拉(潘雨晨)继续组装履带车和三轮车,同时,开始考虑各项比赛任务如何完成。其中一项是摄像头干扰,首先要考虑的问题就是身高不到60cm的机器人,如何能够接触到距离地面2m高的摄像头呢?
他们想到了一个方案:使用强光干扰。但是想要弄“瞎”摄像头,需要光源。选择哪种光源?如何打光?又如何定位光照角度?思路陷入僵局。
马良在报名参赛前就有用气球遮挡摄像头的想法。10月15日上班坐电梯时,看到电梯里一位小朋友拿着能飞的气球。此时他立刻眼前一亮,正是一个天赐良机的试验机会。他向小朋友借来了气球,拉了拉气球的绳子,发现气球的浮力很好,升力足够大,理论上可以用电机绕线和放线的方式控制气球的升降。
他立刻在“阿凡达”的微信群里告诉了队友这个发现,陈杰和潘多拉都激动不已。

下了电梯后,马良感觉大脑又开始飞速运转:如何来让机器人来控制气球的升降呢?这又成了下一个需要攻克的技术难题。
时间过的很快,此时已经是18号晚上,第2天他们就将要前往上海测试设备,但是通过气球干扰摄像头还只是一个理论。收放气球的装置连影子都没有。
这天晚上,马良彻夜未眠,他前半晚夜把另外两名队员组装好的三轮车拿回家进行了改造,实现了对小车行走的灵活和精确的遥控控制。然后,开始制作控制气球升降的装置。他将一个矿泉水瓶、一个廉价的车轮和电机,制作成一个特殊装置来控制气球的升降。制作完成,已是19号凌晨。

在气球遮挡的准备阶段中,还有一个难题:怎么样把气球准确的升到两米高的摄像头前?不仅需要准确地让机器人走到特定的地点,在放气球时还需要控制好气球的上升的速度和方向,才能正好挡住摄像头。
潘多拉是队伍里唯一的女性,也是队员公认的细节大师,在经过她的认真考量后发现,控制气球的线成了关键。这根线,不能太粗,不能太细,不能太软,也不能太硬。
在测试过程中,他们发现由于鱼线太硬,在放线的过程中会绞在一起,鱼线淘汰。此时距离比赛开始,已经时间不多,时间就这样一分一秒的过去。
马良猛然想到:酒店不是有供客人用的逢衣针和线吗?他马上跑去前台,向前台的小哥哥要了一卷逢衣线。经过测试发现,逢衣线是一款非常合适的线。他们最终确定用缝衣线来绕在自制装置的轮子上放气球。
阿凡达团队对细节的追求在整个赛前准备期间,发挥到淋漓尽致。
抵达上海前,本以为东西都备全了,就没什么问题了,到了之后才发现控制气球升降并没有那么简单。
因为上升和下降时给电机的电源是完全相反的,仅仅是控制升降气球的硬件部分,他们就一连换了四个方案:
首先继电器方案:通过两个继电器,一个来完成一个轮子的正反转控制,另一个则转接继电器实现轮子的停止和转动的控制。但正好周日电子市场关闭,无法购买缺少的硬件,此方案卒。
方案二:增加一个驱动板,来专门用来控制气球轮子的升降。但相应的遥控器也需要多一套,一是为了一个气球升降功能放两块驱动板上去, 太浪费。二是在这里多浪费一套电路板, 就没有备份电路板了,于是方案二卒。
方案三:使用TB6612驱动模块。在备用器件中多买了一个TB6612的驱动模块,但焊接上去后, 却发现实际驱动能力不达标。电机转动极慢, 甚至不转。方案三卒。
[培训]传播安全知识、拓宽行业人脉——看雪讲师团队等你加入!
最后于 2019-3-7 19:26
被CCkicker编辑
,原因: